EKFでクォータニオンを推定する
9軸センサに拡張カルマンフィルタ(Extended Kalman Filter:EKF)を適用してクォータニオンを推定します。
9軸センサに拡張カルマンフィルタ(Extended Kalman Filter:EKF)を適用してクォータニオンを推定します。
センサから取得する地磁気のキャリブレーションをしました。
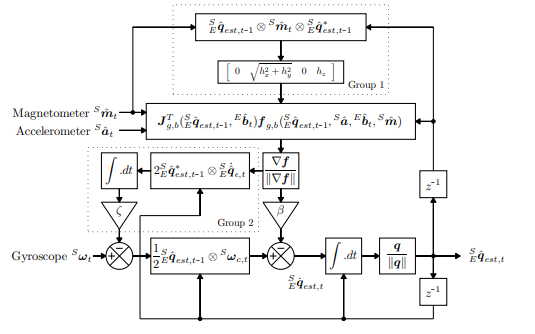
Madgwickフィルタでクォータニオンを推定します。 加速度とジャイロを使ったMadgwickフィルタと,地磁気を考慮したMadgwickフィルタの2つを考えます。
6軸IMUと相補フィルタを用いてオイラー角を推定します。
相補フィルタはカルマンフィルタと同様の働きがあり,簡単で実用性が高いです。