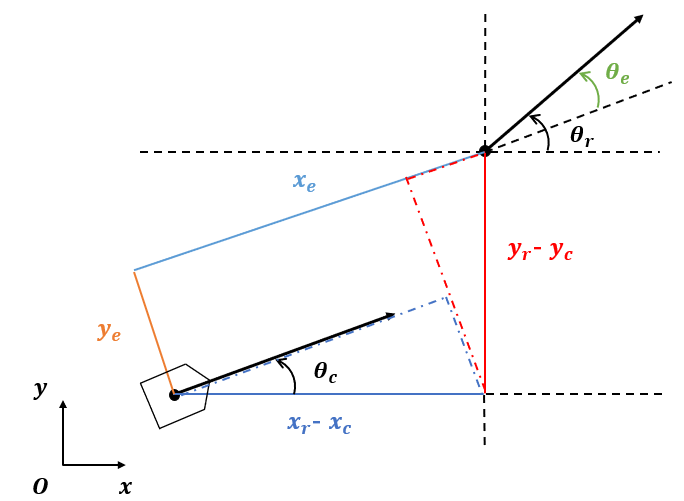
マイクロマウスの横滑り角の考え方の種類を示します。
Kanayama Control Methodを用いてスラローム走行を設計します。
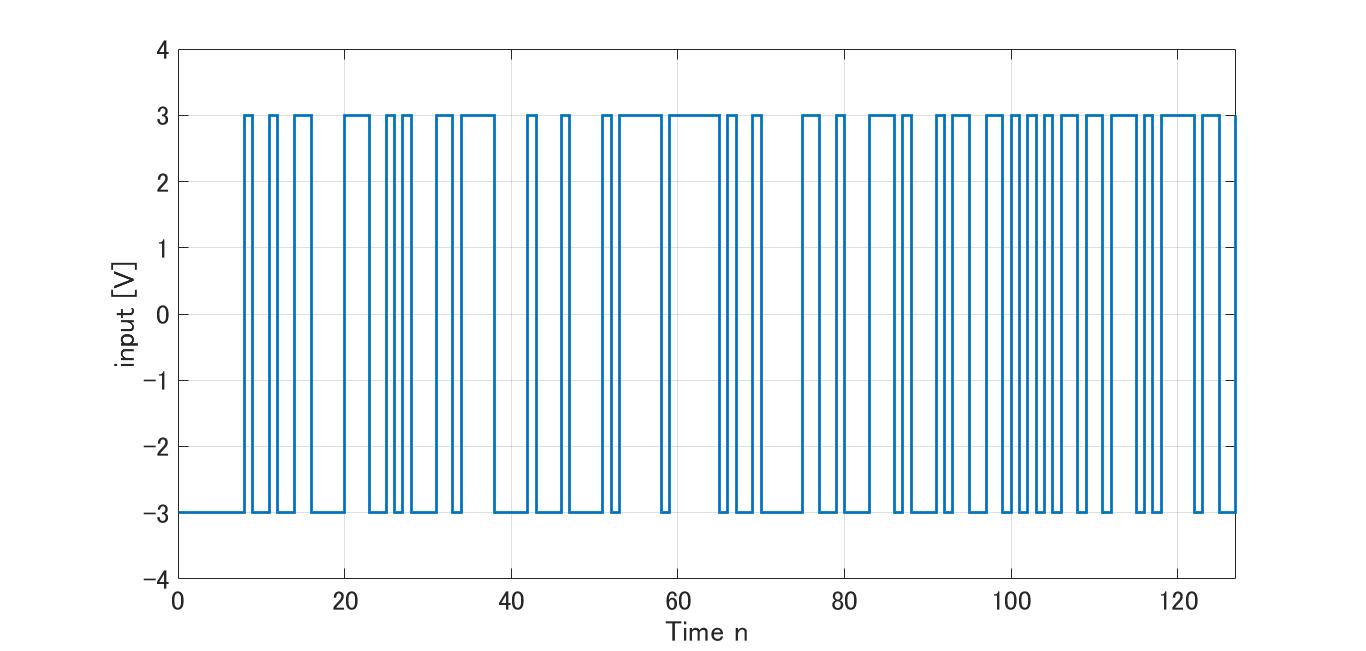
M系列信号を用いて回転方向のシステム同定をします。
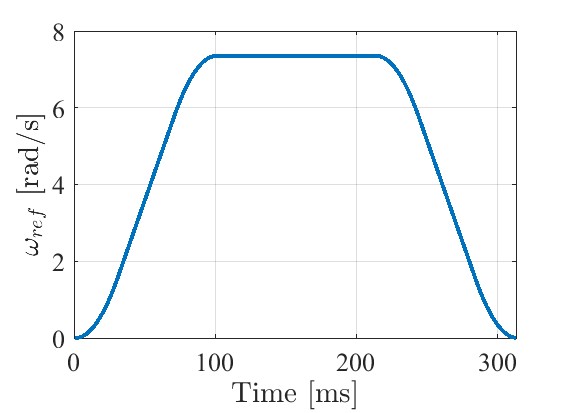
曲線加速を用いて超信地旋回の設計をしました。