PD制御を用いた3次元倒立振子の製作
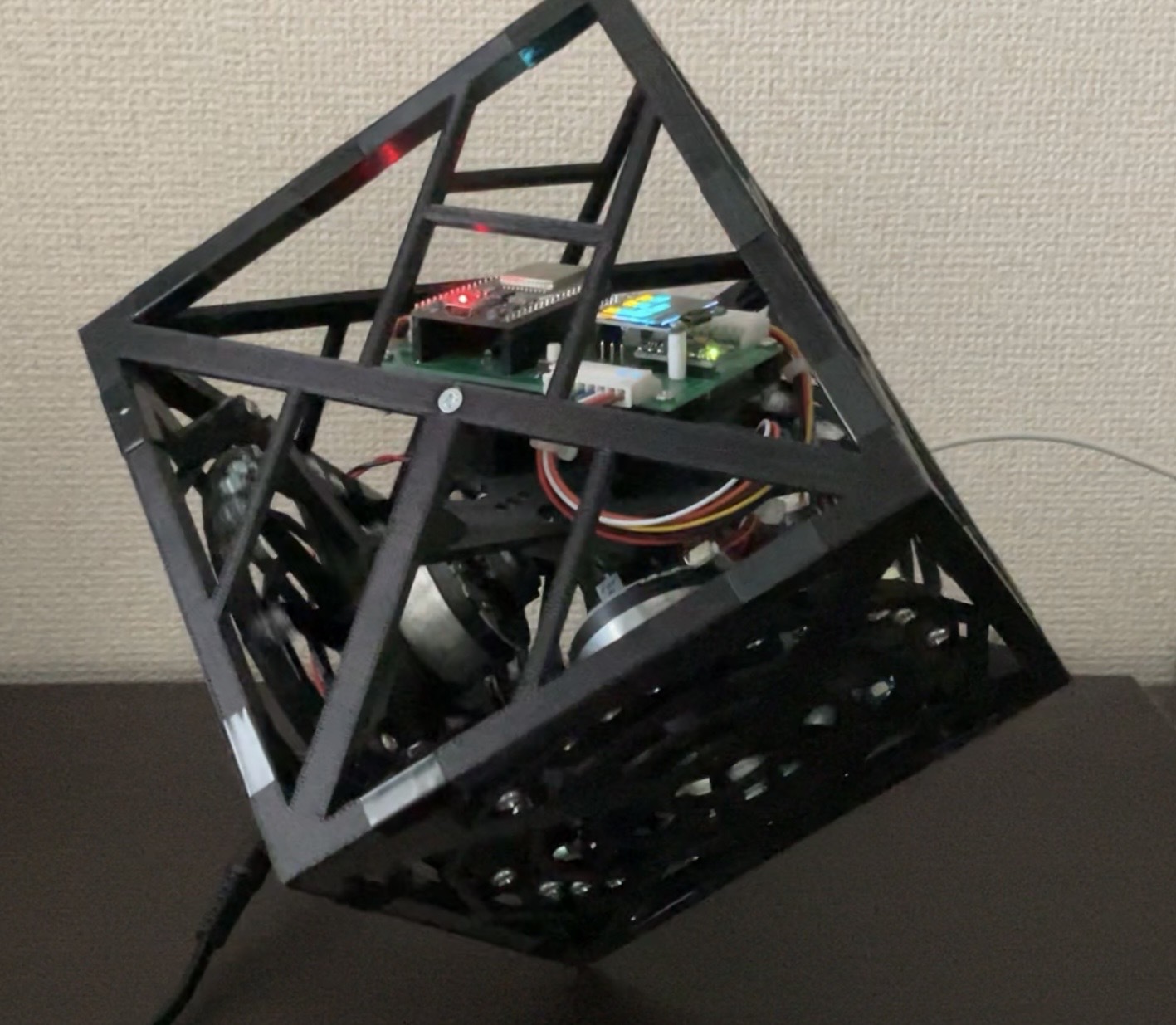
PD制御を用いた3次元フライホイール倒立振子を製作しました。
1. 回路
HomeMadeGarbageさんのものを使わせていただいています。
| マイコン | ESP32 |
| IMU | MPU-6050 |
| モータ | BLDC × 3 |
| 電源 | ACアダプタ 24V 5A |
BLDCはAmazonで購入したものです。入力のPWMにおよそ比例して速度が出力されます。 プログラムも販売されていますが,一部のピン設定を除きC++で1から書きました。
2. 機体
ReM-RCさんのものを使わせていただいています。
3. 制御
3.1 PD制御
倒立状態からの$x$軸周りの傾き角とその角速度を$\theta_x,\omega_x$とし,$y$軸についても同様に$\theta_y,\omega_y$とします。
HomeMadeGarbageさんとReM-RCさんの倒立振子とはセンサーの位置を変えて,頂点で倒立時にセンサの$xy$平面が地面と水平($\theta_x=0$,$\theta_y=0$)になるようにしています。
まずは,このセンサ座標系における入力$u$を考えます。 PD制御に加え,入力の積分値をフィードバックします。 入力の積分値を考慮することで,ホイールの速度が大きくなりすぎないようにしています。
$$u_x(k)=k_1\hat\theta_x(k)+k_2\hat\omega_x(k)+k_3\sum_{i=0}^{k-1}u_x(i)$$
$$u_y(k)=k_1\hat\theta_y(k)+k_2\hat\omega_y(k)+k_3\sum_{i=0}^{k-1}u_y(i)$$
$$u_z(k) = 0$$
$k_1,k_2,k_3$はゲインです。姿勢角$\hat\theta_x,\hat\theta_y$とその角速度$\hat\omega_x,\hat\omega_y$は定常カルマンフィルタによって推定しています。とりあえず倒立できればいいので,$u_z=0$としています。
3.2 入力分配
入力$u_x,u_y,u_z$を3つのホイールに分配します。センサ座標系$xyz$での入力$u_x,u_y,u_z$をホイール座標$x’y’z'$での各ホイールの入力$u^\prime_{x},u^\prime_{y},u^\prime_{z}$に分配します。
まず,センサ座標系$xyz$とホイール座標系$x’y’z'$を一致させる回転行列$R$を考えます。
$$ \left[ \begin{matrix} x'\\ y'\\ -z'\\ \end{matrix} \right]=R \left[ \begin{matrix} x\\ y\\ z\\ \end{matrix} \right] $$$-z^\prime$となっているのは,ホイール座標が左手座標系になっていたためです。考えやすいように$z$軸を反転して,右手座標系で統一します。
この回転は,$y$軸周りに$\beta=\dfrac{\pi}{2}-\cos^{-1}\dfrac{1}{\sqrt{3}}$回転した後, 回転後の$x^\prime$軸周りに$\alpha=-\dfrac{\pi}{4}$回転させるものになります。
$$ R=R_xR_y $$
$$ R_x=\left[ \begin{matrix} 1 & 0 & 0\\ 0 & \cos\alpha &\sin\alpha\\ 0 & -\sin\alpha& \cos\alpha \end{matrix} \right],\quad R_y=\left[ \begin{matrix} \cos\beta& 0 &-\sin\beta\\ 0 & 1 & 0\\ \sin\beta & 0 & \cos\beta \end{matrix} \right] $$
この回転行列から$u^\prime_{x},u^\prime_{y},u^\prime_{z}$を求めます。
$$ \left[ \begin{matrix} u'_{x}\\ u'_{y}\\ -u'_{z} \end{matrix} \right]=R \left[ \begin{matrix} u_x\\ u_y\\ u_z\\ \end{matrix} \right] $$より,
$$ u^\prime_{x} = \dfrac{2}{\sqrt6}u_x-\dfrac{1}{\sqrt3}u_z $$
$$ u^\prime_{y} = -\dfrac{1}{\sqrt6}u_x+\dfrac{1}{\sqrt2}u_y-\dfrac{1}{\sqrt3}u_z $$
$$ u^\prime_{z} = -\dfrac{1}{\sqrt6}u_x-\dfrac{1}{\sqrt2}u_y-\dfrac{1}{\sqrt3}u_z $$
としてホイールに入力します。
制御周期$10\ \text{ms}$程度で制御しています。
4. Kalman Filter
用いたIMUであるMPU-6050は6軸センサなので,加速度と角速度を取得できます。
まず,加速度から直接$\theta_x,\ \theta_y$を求めます。
$$ \theta_x=\tan^{-1}\dfrac{a_y}{\sqrt{a_x^2 + a_z^2}},\quad \theta_y= \tan^{-1}\dfrac{a_x}{\sqrt{a_y^2 + a_z^2}} $$差分方程式は,角速度と組み合わせて以下のようになります。
$$ \theta_{k+1}=\theta_k+(\omega_k-\omega_{\text{bias},k})\Delta{t},\quad \omega_{\text{bias},k+1}=\omega_{\text{bias},k} $$
状態方程式で表現すると,
$$ \left[ \begin{matrix} \theta_{k+1}\\ \omega_{\text{bias},k+1} \end{matrix} \right]= \left[ \begin{matrix} 1 & -\Delta{t}\\ 0 & 1 \end{matrix} \right] \left[ \begin{matrix} \theta_{k}\\ \omega_{\text{bias},k} \end{matrix} \right]+ \left[ \begin{matrix} \Delta{t}\\ 0 \end{matrix} \right]\omega_k $$ $$ \theta_k= \left[ \begin{matrix} 1 & 0 \end{matrix} \right] \left[ \begin{matrix} \theta_{k}\\ \omega_{\text{bias},k} \end{matrix} \right] $$となり,以下のように表現します。
$$ x_{k+1}=Ax_k+Bu_k+v_k $$
$$ y_k=Cx_k+w_k $$
$v_k,\ w_k$はそれぞれシステム雑音と観測雑音です。 このシステムに対してKalman Filterを適用します。
予測ステップで事前状態推定値$\hat x_{k}^-$と事前誤差共分散行列$P_k^{-}$を更新します。$P_{k-1}$は事後誤差共分散行列,$V$はシステム雑音の共分散行列です。
$$ \hat x_{k}^- = A\hat x_{k-1}+Bu_{k-1} $$ $$ P^{-}_k = AP_{k-1}A^\text{T}+V $$フィルタリングステップではカルマンゲイン$G_k$,状態推定値$\hat x_k$,事後誤差共分散行列$P_k$を更新します。 $W$は観測雑音の共分散行列です。
$$ G_k = \dfrac{P^-_kC^\text{T}}{CP^{-}_kC^\text{T} + W} $$ $$ \hat x_k = \hat x_{k}^- + G_k\{y_k - C\hat x_{k}^-\} $$ $$ P_k = (I - G_kC)P^-_k $$推定した$\hat x_k$から$\hat\theta_k$と$\hat\omega_k=\omega_k-\hat\omega_{\text{bias},k}$が求まります。
5. 実験結果
ゲインの調整がなかなか難しく,ふらつきがみられます。 ダイナミクスを考えずに瞬間的な入力を考えたので,その影響があるかもしれません。