状態空間表現を用いた3次元倒立振子の製作
状態空間表現を用いて,3次元フライホイール倒立振子を製作します。
辺倒立については,状態空間表現を用いた1次元倒立振子に記述しています。
The Cubli: A Reaction Wheel Based 3D Inverted Pendulumを参考にしています。
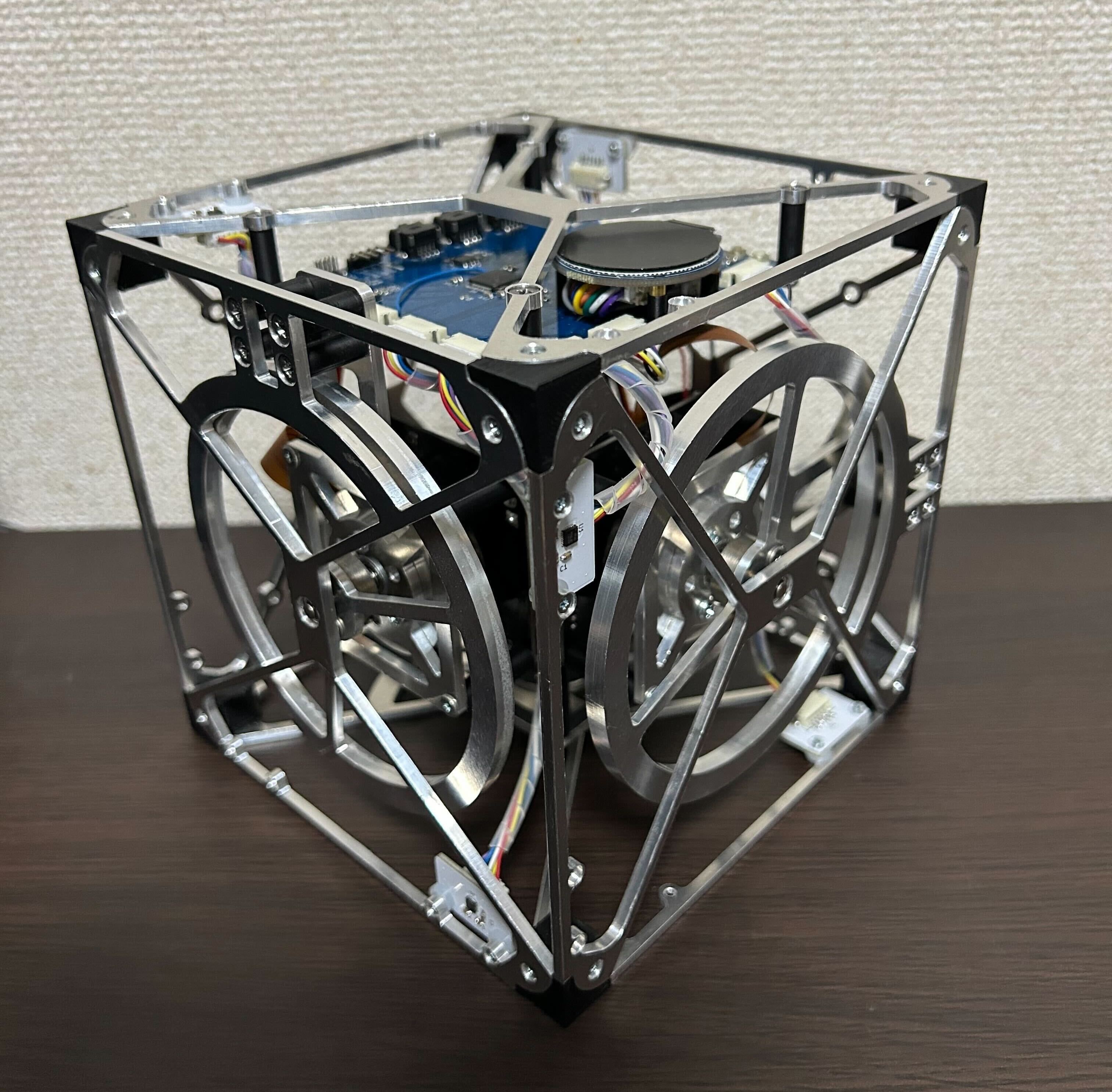
1. 機体
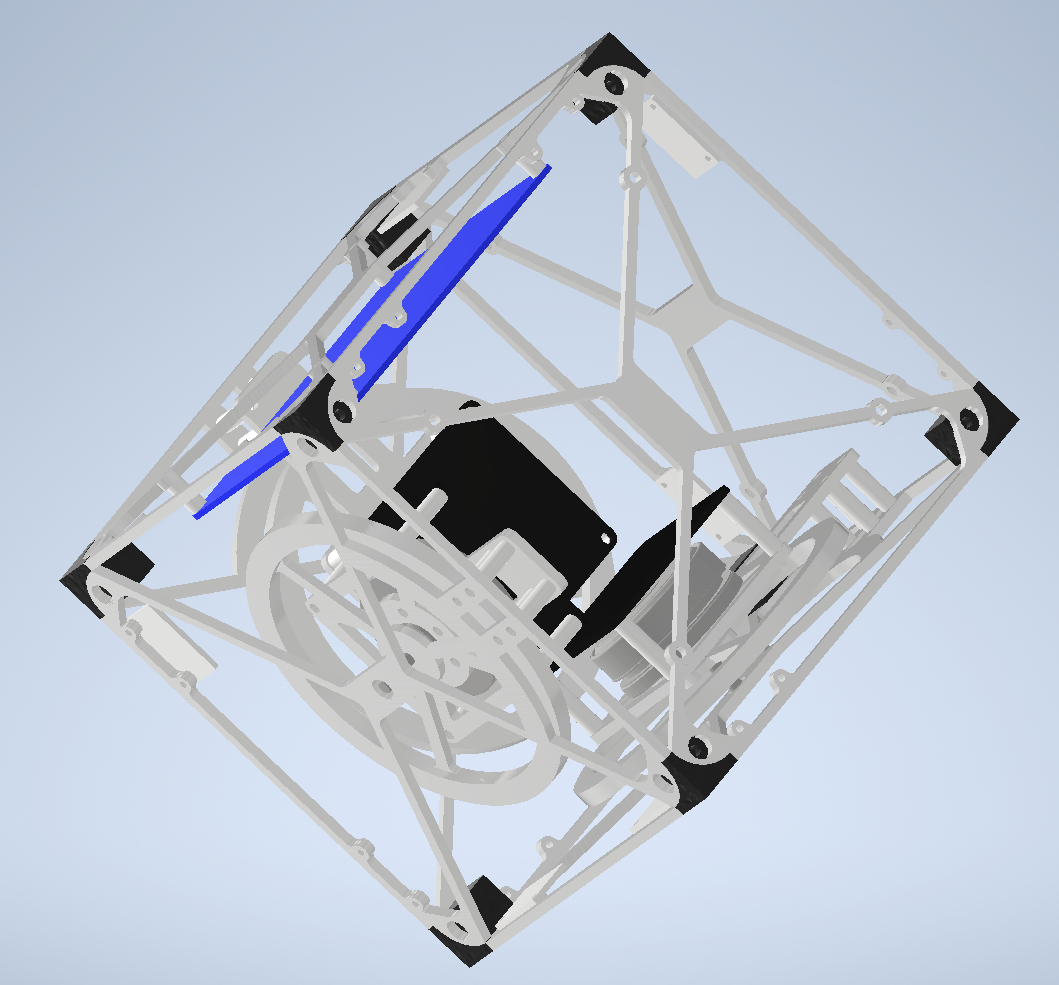
1.1 CAD
1.2 回路
| マイコン(Main Board) | STM32F405RGT6 |
| IMU | MPU-6500 × 6 |
| BLMD | 自作 × 3 |
| BLDC | EC 45 flat (30W) × 3 |
| 電源 | Lipo 3S 850mAh × 2 |
2. 運動方程式
物理変数を以下に示します。
| 物理変数 | |
|---|---|
| $m_b$ | ボディの質量 |
| $m_w$ | ホイールの質量 |
| $r_b$ | ボディ座標系の質量中心位置 |
| $r_w$ | ボディ座標系のホイール質量中心位置 |
| $\omega_b$ | ボディ座標系のボディの角速度 |
| $\omega_w$ | 各ホイールの角速度 |
| $J_b$ | ボディの慣性テンソル |
| $J_w$ | ホイールの慣性テンソル |
| $c_w$ | ホイールの回転動摩擦係数 |
| $u$ | 各モータへの入力電流 |
| $\tau$ | ホイールに作用するモータトルク |
| $k_\tau$ | モータのトルク定数 |
| $g_b$ | ボディ座標系での重力加速度ベクトル |
| $g$ | 慣性座標系での重力加速度(スカラー) |
ZYXオイラー角の運動方程式は次の通りです。
$$ \left[ \begin{matrix} \dot\phi \\ \dot\theta \\ \dot\psi \end{matrix} \right]= \left[ \begin{matrix} 1 & \text{sin}\phi\text{tan}\theta & \text{cos}\phi\text{tan}\theta \\ 0 & \text{cos}\phi & -\text{sin}\phi \\ 0 & \text{sin}\phi\text{sec}\theta & \text{cos}\phi\text{sec}\theta \end{matrix} \right] \left[ \begin{matrix} \omega_x \\ \omega_y \\ \omega_z \end{matrix} \right] $$$r=[\phi,\theta,\psi]$,$\omega_b=[\omega_x,\omega_y,\omega_z]$として,
$$ \dot r = \Phi(r)\omega_b $$
とおきます。
ボディとホイールの回転方向の運動方程式は
$$ \hat J\dot\omega_b = J\omega_b\times\omega_b + Mg_b + J_w\omega_w\times\omega_b $$
$$ J_w\omega_w = (k_\tau u - c_w\omega_w) - J_w\omega_b $$
と表されます。ここで,
$$ g_b=\left[ \begin{matrix} g\ \text{sin}\theta \\ -g\ \text{sin}\phi\text{cos}\theta \\ -g\ \text{cos}\phi\text{cos}\theta \end{matrix} \right] $$ $$ M = m_b\tilde r_b + \sum_{i=1}^{3}m_{w_i}\tilde r_{w_i} $$ $$ J = J_b - m_b\tilde r_b^2 + \sum_{i=1}^{3}(J_{w_i} - m_w\tilde r_{w_i}^2) $$$$ J_w = \text{diag}(J_{w_1},J_{w_2},J_{w_3}) $$
$$ \hat J =J - J_w $$
です。チルダは外積行列を表し,歪対称行列となります。
3. 状態方程式
3.1 非線形状態方程式
状態ベクトルを$x=[r,\omega_b,\omega_w]$とします。
$$ \dot x = f(x) + Bu $$
$$ f(x)= \left[ \begin{matrix} \Phi(r) \omega_b\\ \hat J^{-1}(J\omega_b\times\omega_b + Mg_b + J_w\omega_w\times\omega_b + c_w\omega_w)\\ -\hat J^{-1}(J\omega_b\times\omega_b + Mg_b + J_w\omega_w\times\omega_b) - (J_w^{-1}+\hat J^{-1})c_w\omega_w \end{matrix} \right] $$ $$ B= \left[ \begin{matrix} 0_{3\times3}\\ -\hat J^{-1} k_\tau\\ (J_w^{-1}+\hat J^{-1})k_\tau \end{matrix} \right] $$3.2 線形化
平衡点$x_d=[r_d,\omega_{b_d},\omega_{w_d}]$周りで1次近似します。
$r_d = [\phi_d,\theta_d,\psi_d]$,$\omega_{b_d}=0\in R^3$,$\omega_{b_d}=0\in R^3$です。
頂点で倒立する際は$\phi_d=\dfrac{\pi}{4},\theta_d=\text{atan}\dfrac{1}{\sqrt{2}},\psi_d=$(任意)となります。
線形状態方程式は次のようになります。
$$ \dot{\hat x} = A\hat x + B\hat u $$
$$ A= \left[ \begin{matrix} 0_{3\times3} & \Phi(r_d) & 0_{3\times3}\\ \hat J^{-1}M\left.\dfrac{\partial g_b(r)}{\partial r}\right|_{r=r_d} & 0_{3\times3} & \hat J^{-1}c_w\\ -\hat J^{-1}M\left.\dfrac{\partial g_b(r)}{\partial r}\right|_{r=r_d} & 0_{3\times3} & - (J_w^{-1}+\hat J^{-1})c_w \end{matrix} \right] $$$$ \hat x = x - x_d,\quad \hat u = u - u_d $$
$$ \left.\dfrac{\partial g_b(r)}{\partial r}\right|_{r=r_d}=\left[ \begin{matrix} 0 & \text{cos}\theta_d & 0\\ -\text{cos}\phi_d\text{cos}\theta_d & \text{sin}\phi_d\text{sin}\theta_d & 0\\ \text{sin}\phi_d\text{cos}\theta_d & \text{cos}\phi_d\text{sin}\theta_d & 0 \end{matrix} \right] $$3.3 直接制御できない状態量を除去
線形状態方程式
$$ \dot{\hat x} = A\hat x + B\hat u $$
において,ヨー角の角速度$\dot\psi$はボディの角速度$\omega_b$のみの影響を受けます。 また,入力行列$B$の第3行は0となるため,入力$u$によって$\dot\psi$を直接制御することができません。
ヨー角$\psi$の方程式はその角速度$\dot\psi$の積分によって記述されますが,直接6軸センサからヨー角$\psi$を求めることはできません。 角速度$\dot\psi$を積分してフィードバックすれば良いと思うかもしれませんが,6軸センサではセンサの$z$軸周りのジャイロのオフセットを除去することが できないので,積分するとドリフトが生じてしまいます。
そのため,ヨー角$\psi$を状態量から取り除きます。$\psi$を取り除いた線形状態方程式を
$$ \dot{\bar x} = \bar A\bar x + \bar B\bar u $$
$$ \bar y = \bar C\bar x $$ とします。
4. フィードバック制御
4.1 可制御正準分解
$(\bar A,\bar B)$に関する可制御性行列$V$において$\text{rank}V=7<8$となるので,このままでは不可制御です。 そこで,可制御正準分解をして可制御な部分のみでフィードバック制御します。
$$ \text{rank}V=\text{rank}\left[ \begin{matrix} \bar B & \bar A\bar B & \cdots & \bar A^7\bar B \end{matrix} \right]=7<8 $$
となっていると,$1\times8$行列$P$が存在して
$$ P\left[ \begin{matrix} \bar B & \bar A\bar B & \cdots & \bar A^7\bar B \end{matrix} \right]=0 $$
となります。Cayley-Hamiltonの定理より
$$ P\bar A\left[ \begin{matrix} \bar B & \bar A\bar B & \cdots & \bar A^7\bar B \end{matrix} \right]=0 $$
が成り立ち,0でない$\bar A_3$が存在して$P\bar A = \bar A_3P$と書けます。ここで,$z_2=P\bar x$とおくと
$$ \dot z_2 = P\bar A\bar x + P\bar B\bar u = P\bar A\bar x = \bar A_3P\bar x = \bar A_3z_2 $$ となります。ここで,次の座標変換を考えます。
$$ z=T\bar x=\left[ \begin{matrix} Q\\ P \end{matrix} \right]\bar x $$ただし,$T$が正則となるように$Q$を選びます。すると,変換後のシステムは
$$ \dot z = \left[ \begin{matrix} \bar A_1 & \bar A_2\\ 0 & \bar A_3 \end{matrix} \right]z+ \left[ \begin{matrix} \bar B_1\\ 0 \end{matrix} \right]\bar u $$ $$ z = \left[ \begin{matrix} z_1\\ z_2 \end{matrix} \right] $$の形になります。よって,$z_1$は可制御,$z_2$は不可制御になります。
4.2 離散化
0次ホールドで離散化します。制御周期は$t_s$とします。
$$ z_{1_{k+1}} = \bar A_{1_d}z_{1_{k}} + \bar A_{3_d}z_{2_{k}}+ \bar B_{1_d}\bar u_k $$
4.3 最適制御
$(\bar A_{1_d}, \bar B_{1_d})$に対して離散時間LQRの最適制御を設計します。
$$\bar u_k = -\bar K_d\bar z_{1_k}$$
$\text{rank}V=7<8$より不可制御な次元が1次元あり,可制御正準分解で可制御な部分を抜き出して制御をします。 そのため,具体的にはボディの角速度とホイールの角速度の両方を同時に0にするようなことはできません。
5. 姿勢推定
6つのセンサでそれぞれ測定した加速度から,重力ベクトルを推定します。
それぞれのセンサの位置ベクトルを$p_i (i=1,2,…,6)$とします。 測定した加速度は,センサが位置する点の加速度ベクトル$\ddot{p}_i$と重力ベクトル$^Bg$の和で表されます。
$$^Bm_i=\ ^B\ddot{p}_i+\ ^Bg$$
ここで,
$$^B\ddot{p}_i=\ ^B_IR\ ^I\ddot{p}_i=\ ^B_IR\ ^I_B\ddot{R}\ ^Bp_i$$
であり,$\tilde{R}=\ ^B_IR\ ^I_B\ddot{R}$とすると,
$$^Bm_i=\tilde{R}\ ^Bp_i+\ ^Bg$$
と表せます。この加速度の測定値$m_i$から,重力ベクトル$^Bg$を最小二乗推定します。
$$ \left[ \begin{matrix} ^Bm_1& ^Bm_2& ^Bm_3& ^Bm_4& ^Bm_5& ^Bm_6\\ \end{matrix} \right]= \left[ \begin{matrix} ^Bg & \tilde{R} \end{matrix} \right] \left[ \begin{matrix} 1 & 1 & 1 & 1 & 1 & 1\\ ^Bp_1 & ^Bp_2 & ^Bp_3 & ^Bp_4 & ^Bp_5 & ^Bp_6 \end{matrix} \right] $$$$M=QP$$
$Q$の推定値$\hat{Q}$を疑似逆行列$P^\dagger$を用いて求めると,$\hat{Q}(:,1)$が推定したい重力ベクトル$\hat{g}$に対応します。
$$\hat{Q}=MP^\dagger=MP^\text{T}(PP^\text{T})^{-1}$$
また,ボディの角速度$\omega_b$は6つのセンサの平均値を取って求めます。 推定した重力ベクトル$\hat{g}$とボディの角速度$\omega_b$から,相補フィルタでオイラー角を推定するでオイラー角を推定します。
6. 実践する
今後追記します。