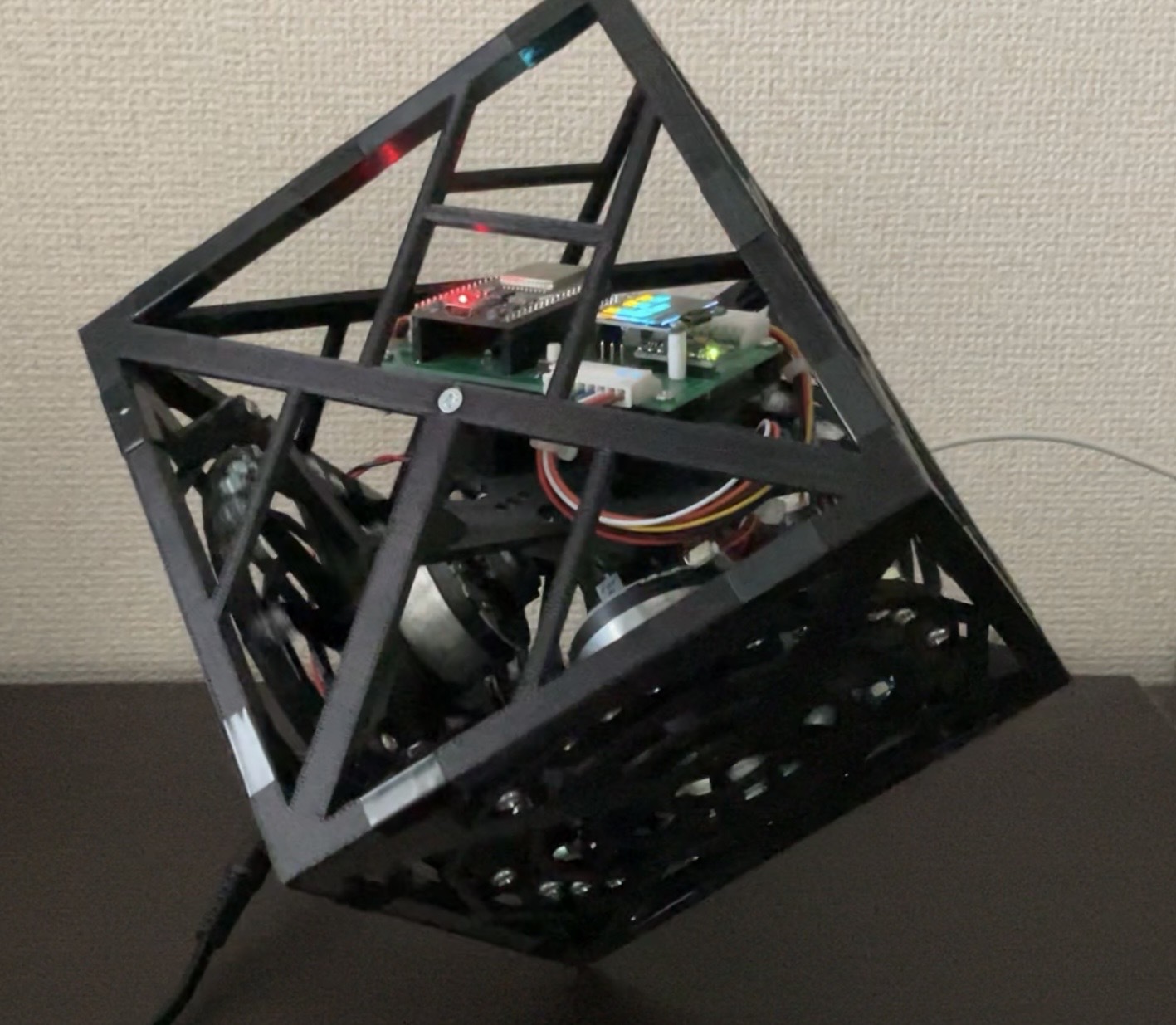
PD制御を用いた3次元倒立振子の製作
PD制御を用いた3次元フライホイール倒立振子を製作しました。
PD制御を用いた3次元フライホイール倒立振子を製作しました。
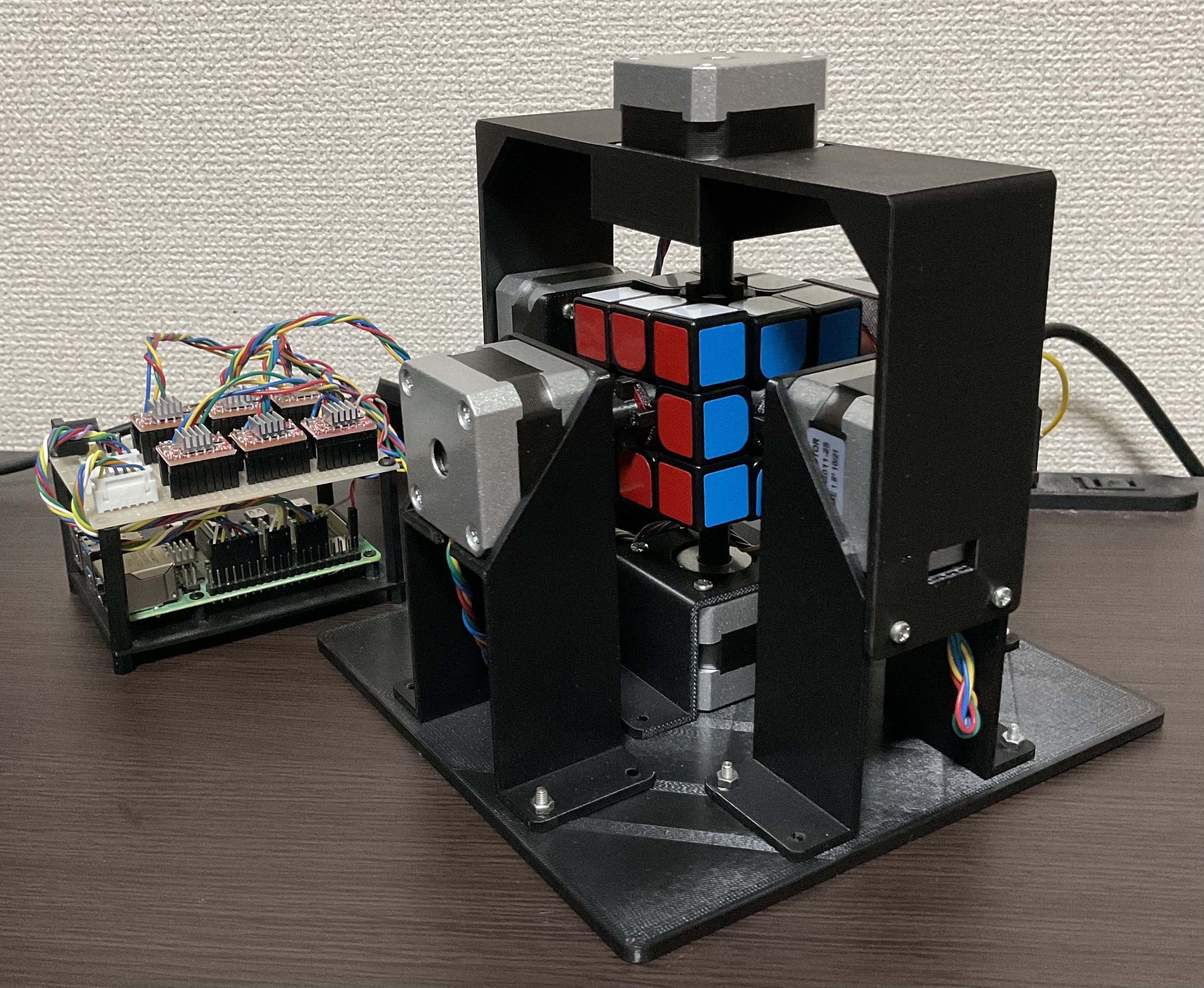
Two-Phase-Algorithmを用いて自動でルービックキューブを揃えるロボットを製作しました。
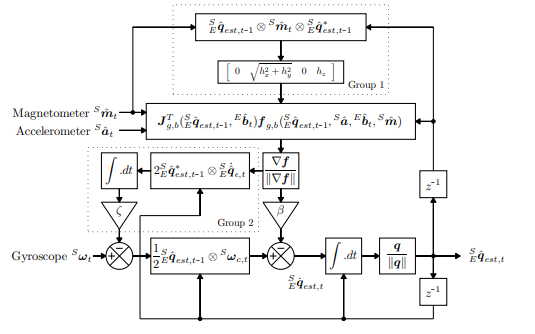
Madgwickフィルタでクォータニオンを推定します。 加速度とジャイロを使ったMadgwickフィルタと,地磁気を考慮したMadgwickフィルタの2つを考えます。
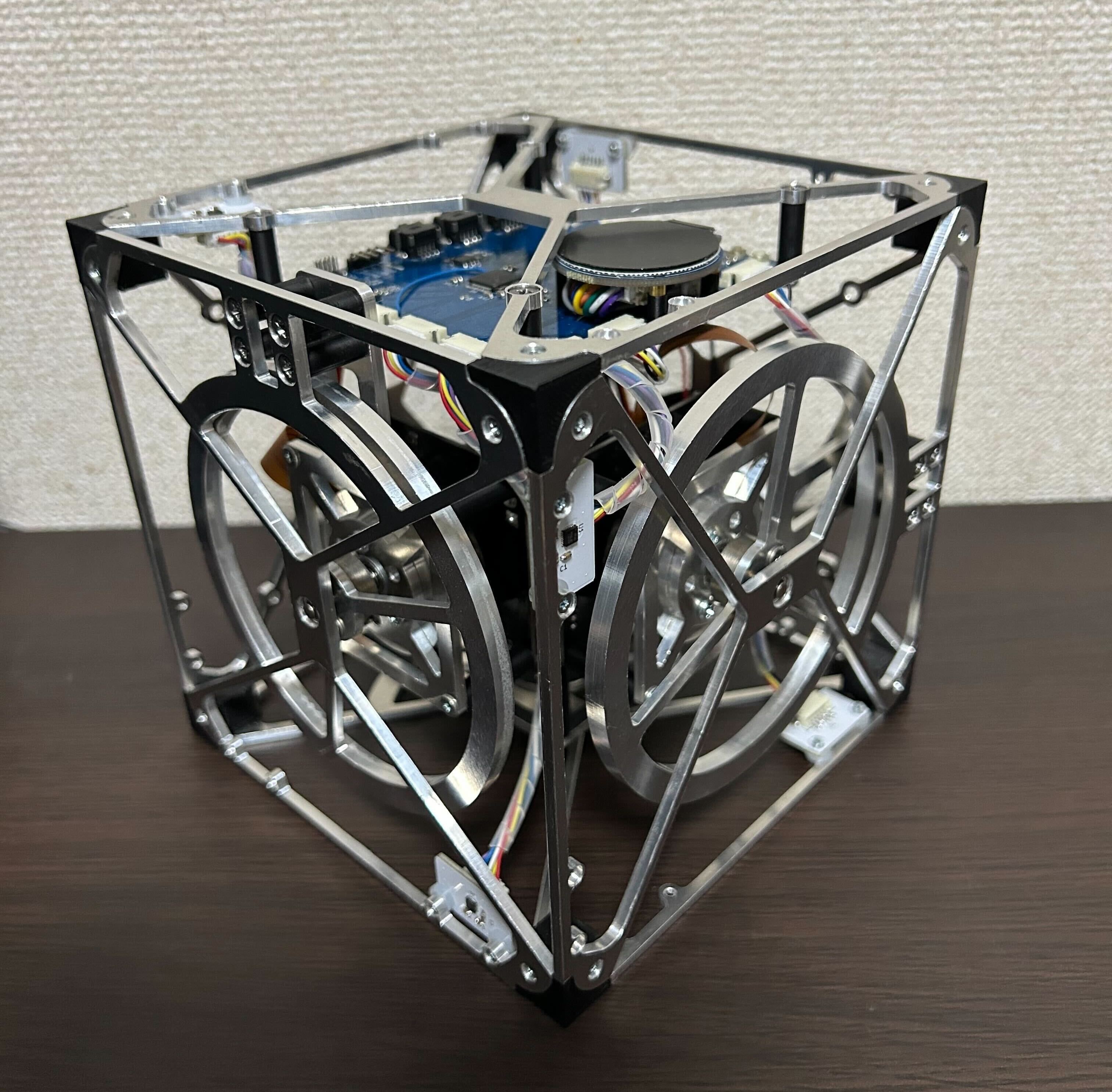
状態空間表現を用いて,3次元フライホイール倒立振子を製作します。
6軸IMUと相補フィルタを用いてオイラー角を推定します。
相補フィルタはカルマンフィルタと同様の働きがあり,簡単で実用性が高いです。
状態空間表現を用いた,1次元フライホイール倒立振子の制御を説明します。
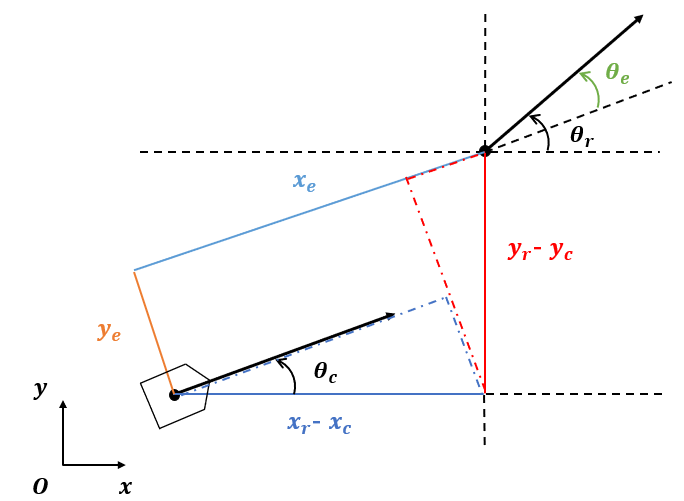
Kanayama Control Methodを用いてスラローム走行を設計します。
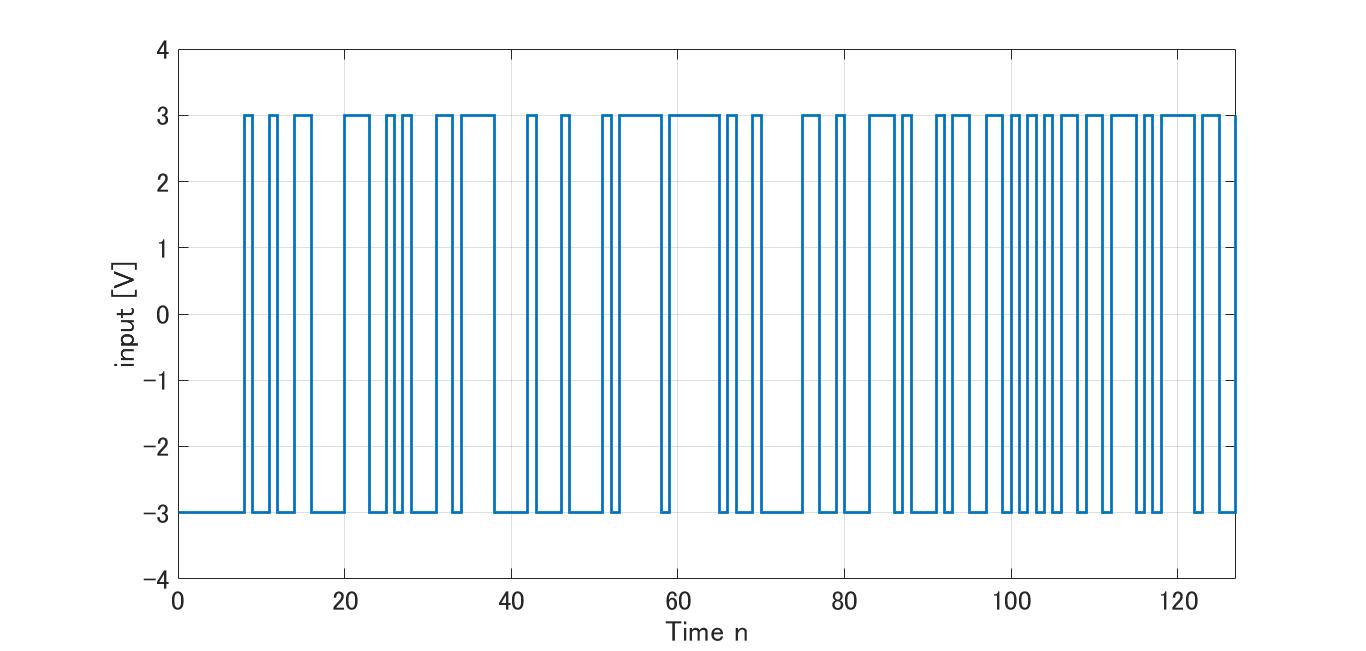
M系列信号を用いて回転方向のシステム同定をします。
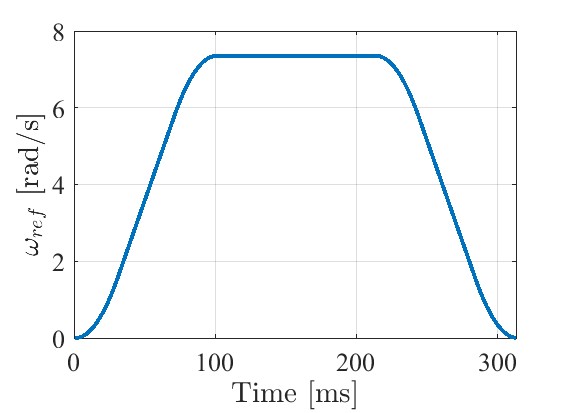
曲線加速を用いて超信地旋回の設計をしました。
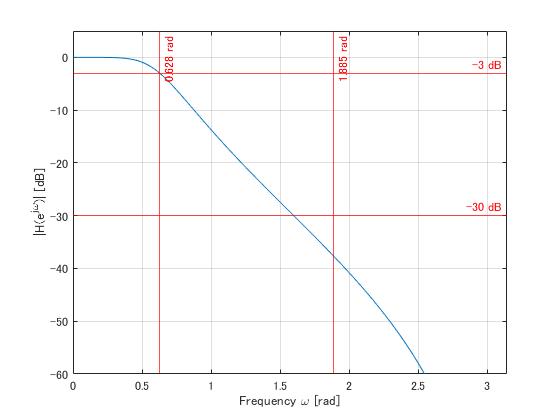
低域のIIRフィルタを設計し、ジャイロセンサに適用します。ここではまずプロトタイプフィルタを考え、双1次z変換によって目的のディジタルフィルタを求める手法を用います。