移動平均フィルタの設計
所望のフィルタ特性に合わせて,何回分の移動平均を取ればよいかを求めます。
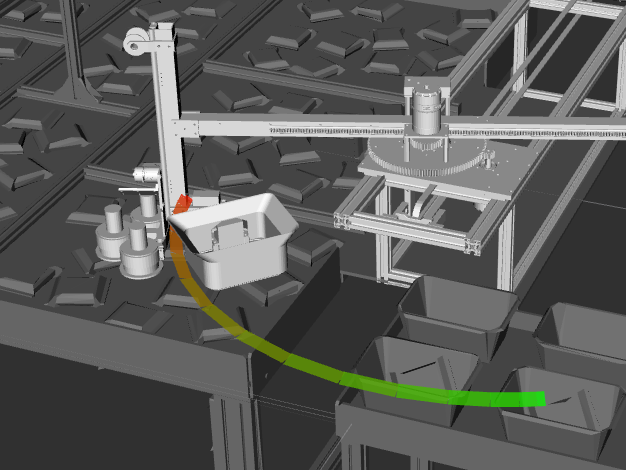
Pontryaginの最小原理を用いた軌道生成
Pontryaginの最小原理を用いて,2点境界値問題における評価関数を最小化する軌道を解析的に求めました。 障害物は考慮せず,計算コストを小さくする軌道生成を目的とします。
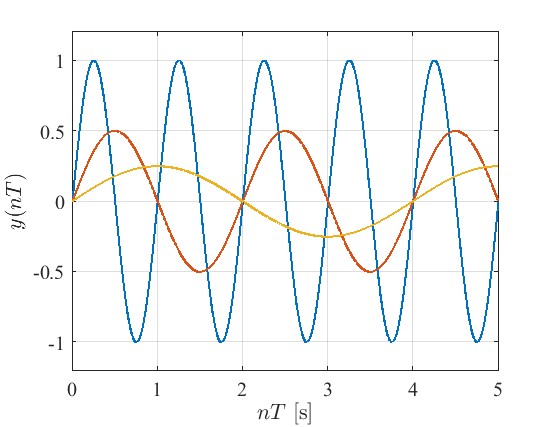
Z変換を用いた正弦波の生成
今ではマイコンで$\sin(),\ \cos()$関数が簡単に実装でき,DSPでも高速処理できます。 一方ではz変換を用いて処理を高速化する手法もあります。
ここでは勉強のため,z変換を用いて正弦波を生成します。

ルービックキューブのパターン生成
自動でルービックキューブを揃えるロボットによるパターン生成をしました。
EKFでクォータニオンを推定する
9軸センサに拡張カルマンフィルタ(Extended Kalman Filter:EKF)を適用してクォータニオンを推定します。
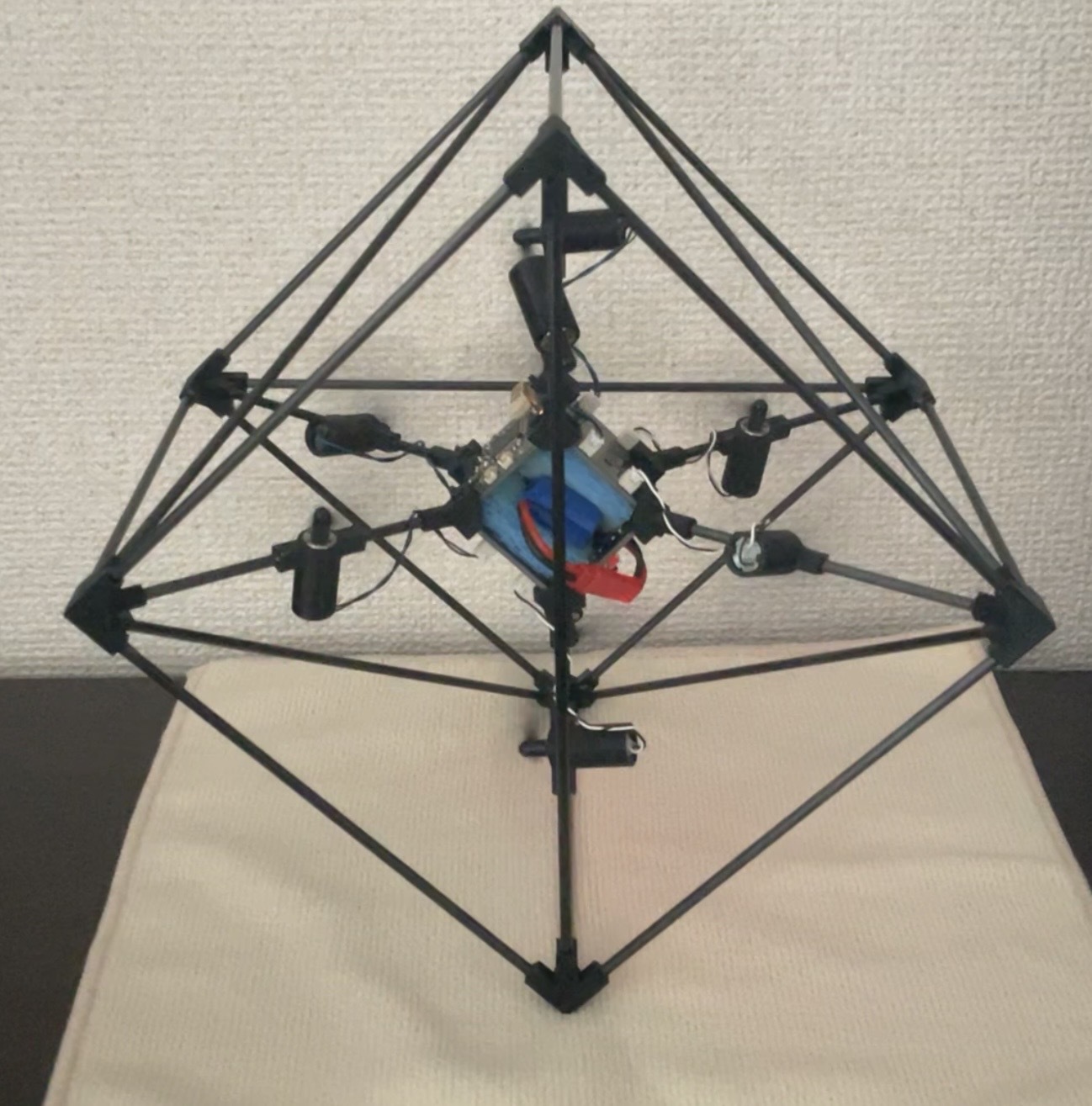
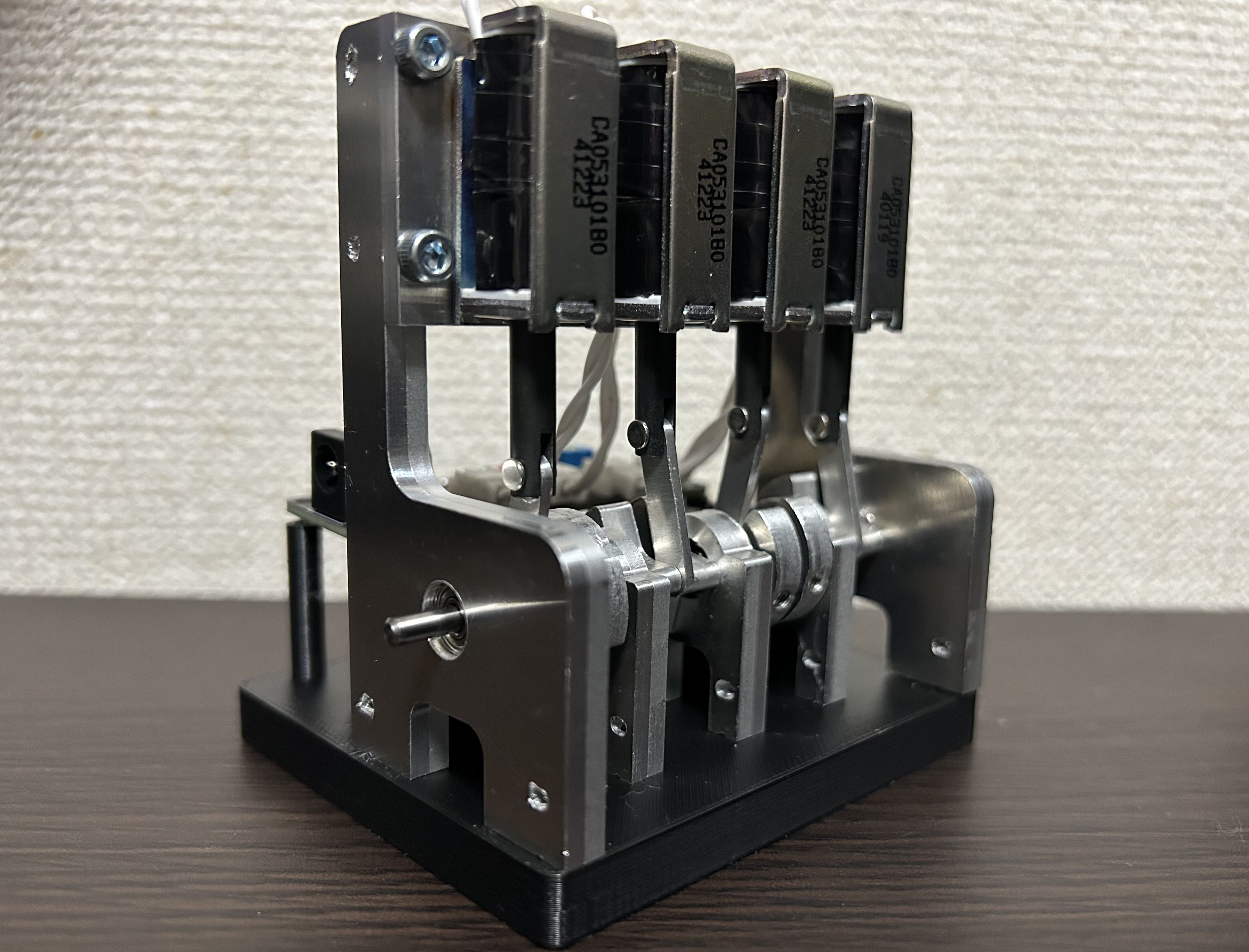
プロペラを用いた倒立振子の製作
プロペラを用いた倒立振子を製作しました。
MFT2023 作品紹介
マイクロマウスの横滑り角の考え方
マイクロマウスの横滑り角の考え方の種類を示します。
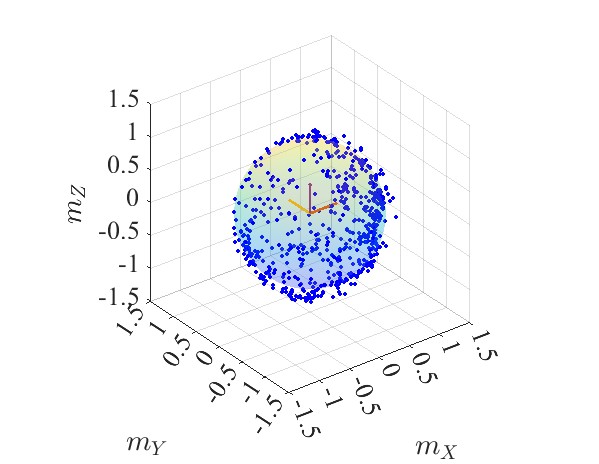
地磁気センサのキャリブレーションをする
センサから取得する地磁気のキャリブレーションをしました。